嵌入式系統應用在汽車領域快速增長。許多車輛設計使用CAN進行電子控制單元 (ECU) 之間以及ECU和傳感器,執行器和顯示器的通信。從制動系統到信息娛樂系統的子系統都提供實時通信的功能。
工程師通常都會使用示波器來抓取CAN總線數據,與通信采集卡不同,示波器不僅可以進行協議分析,還可以看到物理層傳輸情況,從軟硬件兩方面來幫助工程師了解分析總線情況。
一、什么是 CAN 總線?
控制器局域網絡 (CAN) 為最初針對汽車應用設計的總線結構,但是,它也在其他領域找到用武之地。CAN 總線是在不同類型電纜(具體取決于應用)上運行的均衡(差分)2 線接口。此標準規定了幾種不同數據速率,1 Mb/s 為 CAN 的最快速率。最新版本 CAN FD(靈活數據速率)已經將傳輸速度升至 10 Mb/s,同時還提高了包有效載荷數據字段最大長度。為了保持信號質量,總線需要在電纜的兩端使用 120Ω 終端電阻,以確保阻抗匹配。
自 1980 年代推出以來,CAN 總線一直用于在電子控制單元 (ECU) 之間以及與車輛傳感器之間傳輸數據。
二、聯網汽車中的 CAN 總線
近年來,汽車中產生、傳輸和接收的數據量大大增加,并且在未來還會繼續增加。如今,許多汽車都包含 80 多個電子控制單元 (ECU),它們通過不同的總線網絡連接。在未來幾年,我們預計這個數字將超過 100,因為一些豪華汽車使用的 ECU 數量已達到 150 個。
汽車子系統間的集成度提高意味著除了處理傳感器和致動器信號外,還有許多 ECU 同時在更多的串行總線上通信。例如,ECU 通過 CAN(對于關鍵系統)和 LIN(對于優先級較低的控件,例如車窗和后視鏡)通信極為常見。
三、CAN 總線故障排除
由于駕駛員的安全依賴于這些系統的正常通信,因此確保 CAN 總線配置正確至關重要。幸運的是,當您有了合適的工具,排除 CAN 總線故障就變得很容易。在這個簡短的指南中,我們將介紹故障排除技巧和快速完成任務所需的工具。
四、如何用示波器調試解碼的 CAN 總線協議
1、CAN總線觸發
進行CAN總線觸發時,若使用默認的上升沿觸發,會出現波形跳動,不能穩定觸發在屏幕中間的情況,此時可以使用總線觸發。

2、設置CAN / CAN FD總線解碼
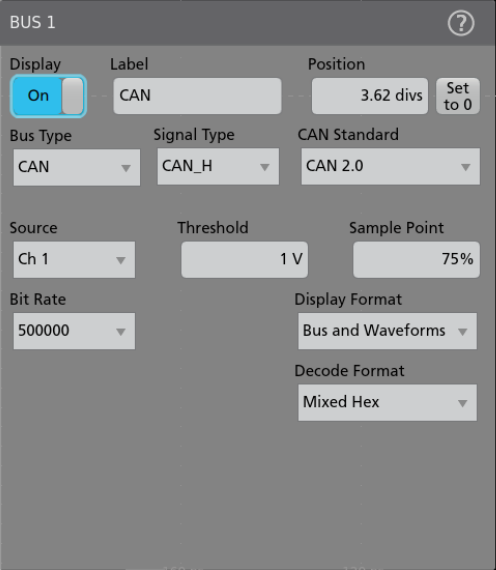
在配備 CAN 解碼和觸發功能的泰克示波器上,按下前面板總線按鈕可以設置示波器的CAN總線解碼信息。為了示波器能夠正常解碼,需要輸入一些基本參數:
CAN標準
信號類型
輸入通道
比特率
電壓閾值
采樣點(以位時間的百分比表示)
CAN總線是差分信號。示波器可以使用無源探頭進行總線解碼,若使用差分探頭則可以提高信號的保真度和抗噪性。
3、了解CAN/CAN FD總線解碼信息
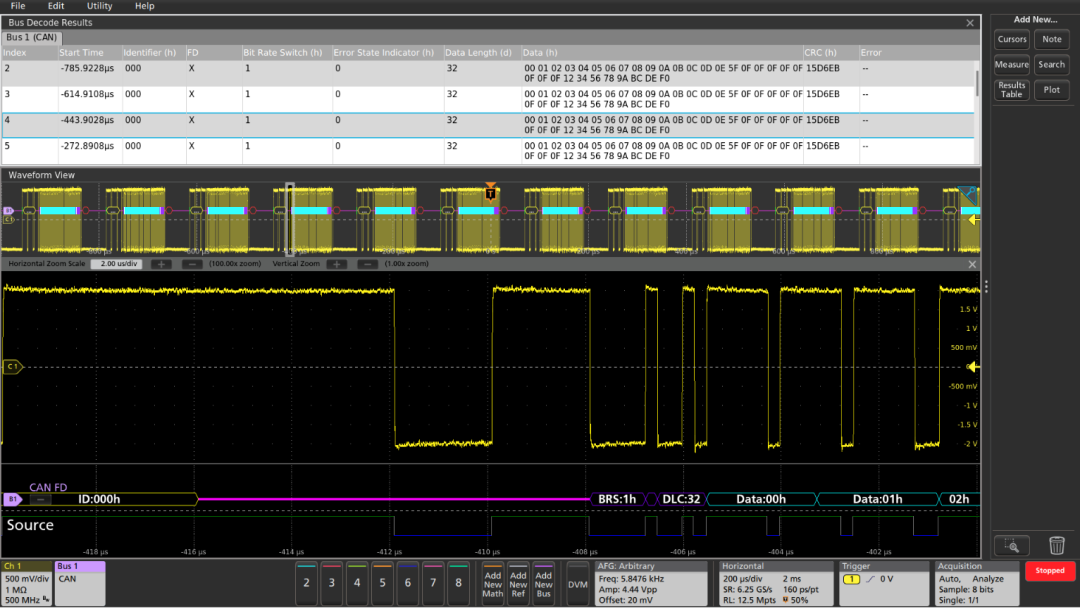
CAN信號被解碼并顯示為總線波形(底部)和事件表(頂部)
CAN報文解碼后的元素,會使用不同顏色來顯示。
對于工程師,時間表格式可能更有用。這種帶有時間戳的總線活動顯示可以很容易地與軟件列表進行對應,并提供傳輸速度的簡單計算。
事件表還提供與波形顯示的鏈接。您可以單擊表格中顯示的報文,將會自動跳轉到對應波形,配合旋鈕可以放大相應的總線信號和生成的解碼總線波形,并顯示在屏幕的下半部分。
4、DBC文件解析