機器人的廣泛應用解放了生產力,同時又促進了人類對機器人的研發重視。機器人從普通的單一功能逐步發展到具備模仿人類“大腦”的功能。導航系統則是機器人“大腦”的一項重要功能,近年來,激光導航機器人研究成為炙手可熱的重要課題。
一、激光導航機器人綜述
(一)激光導航機器人
自主導航技術是機器人的核心技術之一,也是機器人研究和攻克的重點。激光導航機器人通常內嵌激光雷達和高分辨率激光掃描儀,探測其周圍環境并進行定位,并通過AICU系統生成3D地圖,從而進行路徑規劃。激光導航機器人可配備高清攝像機和紅外熱像儀等檢測裝置,在該導航系統支持下實行全自主自動巡檢、紅外診斷和外觀檢測,能夠及時發現設備熱缺陷和外觀問題,將數據實時自動檢測、傳輸、分析和告警,大大提高巡檢自動化水平和檢測的準確性。

(二)激光導航機器人構成及工作過程
激光導航機器人的硬件部分由微計算機、激光雷達和激光掃描系統、導航系統、控制系統、無線通信系統、信號采集系統、機器人本體組成。激光導航機器人導航系統工作時,激光雷達和激光掃描系統每隔數10ms旋轉一周,發出經過調制的激光束,收到經調制的反射板的反射光后,經過調解解碼,得到有效的信號,計算機可以及時讀入當時收到的反射信號時激光器的旋轉速度及傾斜角,從而描出周邊“地圖”實現導航。
二、激光定位導航工作原理
(一)激光定位原理
激光定位是利用旋轉激光傳感器檢測路標,經三角幾何計算確定位置和方向,并依此進行定位的方式,即通過測量已知路標與機器人之間的距離來實現機器人定位。通常,需要在目標環境中固定位置設定若干路標,建立坐標系,以激光傳感器轉動中心建立傳感器坐標,記錄傳感器每掃描一周所形成的夾角,從而經計算出目標所處坐標的具體位置。
(二)導航控制原理
一般而言,機器人移動路徑大多數為直線,對于行走路徑中長距離轉彎則可簡化為直線路徑代替,因此機器人導航控制就可歸結為對機器人相對于當前運行路徑的位置偏差和航向偏差的控制。在實際應用過程中,正是利用激光定位傳感器解碼并實時輸出的高精度位置坐標數據,對當前位置及目標環境位置進行精準定位,通過微計算機向機器人控制系統下達指令信號,從而控制機器人左右兩輪速度與方向,使其始著預先設定的路徑運行。
三、基于激光導航電力巡檢機器人系統設計
(一)硬件系統設計方案
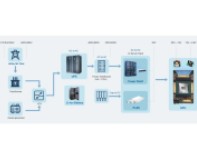
激光導航電力巡檢機器人主要由微計算機、智能控制系統、驅動系統、無線通信系統、傳感與導航系統、人機交互系統等組成。驅動系統主要為滿足驅動機器人本體之需要;無線通信系統主要用于下達控制命令;傳感與導航系統主要機器人內外環境感知與運動操控;人機交互系統則是方便人類監控和介入機器人的相應狀態和運行之需。
(二)軟件系統設計方案