當使用視頻內窺鏡測量任何關鍵性部件時,需要考慮兩個因素:被測物體的尺寸和到物體的距離。這些關鍵因素會影響測量的準確性,因此在測量之前必須了解內窺鏡的端部距離目標物體有多遠。
使用現代視頻內窺鏡測量的優勢
為了解決這個問題,現代視頻內窺鏡在測量開始之前,可以在實時圖像中確定端部到目標的距離(或Z軸距離)。通過測量立體圖像中所有像素的Z軸距離,視頻內窺鏡可以實時呈現這些距離的樣本,同時還可在立體圖像的任何區域加亮顯示最多5個單獨的Z軸值。這樣有助于檢測人員了解表面輪廓,并獲得重要的細節,從而可以充滿信心地完成測量。
這個特性可對葉尖間隙測量提供很大的幫助,因為視頻內窺鏡和葉尖間隙之間的角度會導致對間隙邊界的錯誤感知。因此,葉尖間隙測量被視為深度或高度間隙測量。要進行這種測量,必須在已知表面上設置一個參照平面,并在垂直于這個平面的方向上進行測量。

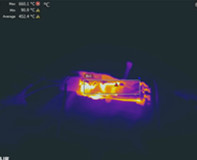
葉尖和發動機護罩間隙的2D立體圖像和3D模型
要了解實際操作中的情況,請查看上面的圖像。圖像中顯示了靠近發動機護罩的空壓機葉片的2D立體圖像和3D模型。圖像使用奧林巴斯IPLEX NX工業視頻內窺鏡捕獲,這款內窺鏡可以在端部到目標距離不超過60毫米的范圍內進行準確測量。
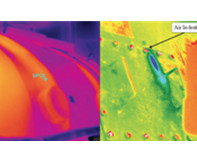
這里,參考面被定義在護罩的平面上。通過切換到3D模式,可以快速檢查平面的方向是否正確。為了獲得更清晰的視覺效果,可以添加顏色編碼,如下圖所示。

3D模型中的顏色編碼表明表面上的點是否位于所定義的參照平面三角形的下方或上方。綠色:位于參考平面上;紅色:位于參考平面的下方;藍色:位于參考平面的上方。
正確定義了平面之后,測量葉尖間隙的操作就易如反掌。在上圖中,所選像素到由三角形定義的參考平面的距離測量值為1.48毫米。
航空航天行業的檢測對于安全、高效的空中飛行至關重要。精確的RVI測量功能,如:通過3D建模進行立體測量。