5)能經受住苛刻的運行條件,可進行十分頻繁的正反向和加減速運行,并能在短時間內承受數倍過載。交流伺服驅動器因其具有轉矩轉動慣量比高、無電刷及換向火花等優點,在工業機器人中得到廣泛應用。
2、伺服電機的核心技術
1)信號接插件的可靠性。國產伺服需要繼續改進,而且接插件的小型化、高密度化也是趨勢,與伺服電機本體的集成設計是個很好的做法,目前日系的伺服電機很多就是這樣設計的,方便安裝、調試、更換。
2)編碼器的高精度。尤其工業機器人上用的多圈絕對值編碼器,目前嚴重依賴進口 ,是制約我國高檔伺服系統發展的重要瓶頸之一。編碼器的小型化也是伺服電機小型化繞不過去的核心技術。縱觀日系伺服電機產品的更迭,都是伴隨著電機磁路和編碼器的協同發展升級。
另外,國內的伺服系統的基礎性研究缺失,包括絕對值編碼器技術、高端電機的產業化制造技術、生產工藝的突破、性能指標的實用性驗證和考核標準的制定等等。這些都需要國內機器人行業的核心零部件企業去完善。
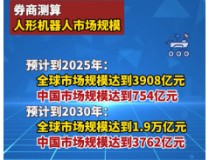
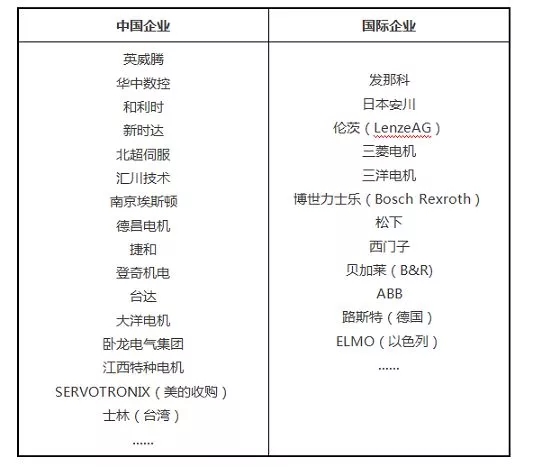
3、機器人伺服電機的部分企業
控制器
工業機器人控制器是機器人控制系統的核心大腦。控制器的主要任務是對機器人的正向運動學、逆向運動學求解,以實現機器人的操作空間坐標和關節空間坐標的相互轉換,完成機器人的軌跡規劃任務,實現高速伺服插補運算、伺服運動控制。
機器人控制器由機器人控制器硬件和機器人控制器軟件組成。機器人控制器的軟件部分是工業機器人的“心臟”,隨著科技的發展,工業機器人從下位機到上位機的應用軟件方面都有了不同程度的研究成果。
機器人軸數越多,對控制器性能要求也越高:機器人自由度的高低取決于其可移動的關節數目,關節數愈多,自由度越高,位移精準度也越高,其所使用的伺服電機數量就相對較多,即越精密的工業型機器人所用的伺服電機數量愈多。一般每臺多軸機器人由一套控制系統控制,也意味著控制器性能要求越高。
控制系統的開發涉及較多的核心技術,包括硬件設計,底層軟件技術,上層功能應用軟件等,隨著技術和應用經驗的積累,國內企業機器人控制器產品已經較為成熟,是機器人產品中與國外產品差距最小的關鍵零部件,國內機器人控制器所采用的硬件平臺和國外產品相比并沒有太大差距, 差距主要在控制算法和二次開發平臺的易用性方面。
工業機器人控制器的部分企業

減速器
工業機器人核心部件減速器是機械傳動的核心,機器人的速度、精度都與減速器有關,工業機器人使用的減速器主要包含:諧波減速器、RV減速器。
1、諧波齒輪減速器
諧波齒輪減速器是利用行星齒輪傳動原理發展起來的一種新型減速器,由波發生器、柔輪和剛輪組成,依靠波發生器使柔輪產生可控彈性變形,并靠柔輪與剛輪嚙合來傳遞運動和動力。
諧波傳動具有運動精度高,傳動比大、質量小、體積小、較小的傳動慣量等優點。最重要的是能在密閉空間傳遞運動,這一點是其他任何機械傳動無法實現的。其缺點為在諧波齒輪傳動中柔輪每轉發生兩次橢圓變形,極易引起材料的疲勞損壞,損耗功率大。同時,其引起的扭轉變形角達到20’一30’甚至更大。受軸承間隙等影響可能引起3 7~6’的回程誤差,不具有自鎖功能。

諧波齒輪減速器
2、RV減速器
RV減速器由一個行星齒輪減速機的前級和一個擺線針輪減速機的后級組成。RV傳動是新興起的一種傳動,它是在傳統針擺行星傳動的基礎上發展出來的,不僅克服了一般針擺傳動的缺點,而且具有體積小、質量輕、傳動比范圍大、壽命長、精度保持穩定、效率高、傳動平穩等一系列優點。