近日,浙江省數字精密測量技術研究重點實驗室為杭州某公司生產的管道檢測機器人開展專項計量測試技術服務,助力管道檢測機器人產品質量提升。
管道機器人是一種可沿細小管道內部或外部自動行走、攜帶一種或多種傳感器及操作機械,在工作人員的遙控操作或計算機自動控制下,進行一系列管道作業的機、電、儀一體化系統。它由驅動模塊、控制模塊、供能模塊和輔助模塊組成,其中運動模式是管道機器人的核心,決定了管道機器人的整體性能。

輪式移動機器人在管道中運行時,由于管道尺寸大小不一、具有彎道和“T”型接頭等,輪式移動機器人的每一個輪子在管道中的位姿是不可預測的,輪式管道機器人在實際應用過程中遇到的問題譬如在彎管和不規則管道時發生運動干涉,由于內耗造成的驅動力不足,由于壁面的變形以及機器人本身的誤差,導致機器人在管道中偏離正確的姿態,甚至側翻和卡死等。
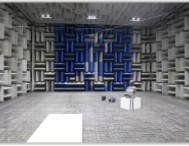
該公司新研發的管道檢測機器人,主要應用于城市地下管網的探測,需要對其研制的管道測繪機器人開展在大約200m量程范圍內的水平和高程測量精度、里程測量精度等性能進行測試評價。浙江省數字精密測量技術研究重點實驗室團隊成員擬依托浙江省計量科學研究院的高精度測繪地理信息裝備測量能力對機器人性能進行測試。

雙方團隊成員按照管道檢測機器人產品性能要求,在野外空曠試驗場設計并鋪設了相應試驗管道。通過高精度全站儀、測地型GNSS接收機(RTK)等高精度計量設備測量管線的空間三維坐標作為標準位置信息,同時被檢測的管道機器人沿管道內壁往返爬行不少于三測回,通過機器人的數據采集器和數據處理軟件采集并計算得到管道地理位置信息,最后通過不同坐標系間空間坐標參數的轉換,與標準位置信息進行三維空間方向的比較來驗證管道機器人運行位置的準確性。
管道檢測機器人廣泛應用于工業和民生領域,在海洋油氣儲運領域和市政管網(如燃氣、水務、電力等)建設和調查工作中大量應用。目前全國把市政管網安全和地下空間設施規劃提到了新的高度,從中央到地方各級政府都把這項工作作為政府重點監管內容之一,因此亟需獲取各地管網的GIS地理信息數據,建立數字化信息管理庫,為各級政府部門的實時監管和決策提供技術支持。