




LiDAR,是Light Detection and Ranging的縮寫,常用作代表激光雷達(dá)。
LiDAR是一種傳感技術(shù),可發(fā)射低功率,人眼安全的激光進(jìn)行脈沖測量,并測量激光完成傳感器與目標(biāo)之間往返所需的時間。所得的聚合數(shù)據(jù)用于生成3D點云圖像,同時提供空間位置和深度信息以識別,分類和跟蹤運動對象。
")
1、LiDAR工作原理
LiDAR的工作原理是檢測并測量返回傳感器接收器的光。一些目標(biāo)比其他目標(biāo)反射的光線更好,這使它們更容易可靠地檢測和測量到傳感器的最大范圍。比如,黑色表面善于吸收更多光,而白色表面能夠反射更多的光。這樣一來,與目標(biāo)主題顏色相對較暗的目標(biāo)相比,相對顏色較亮的目標(biāo)更容易在更長的距離上受到可靠地檢測或測量。
對于窗戶等像鏡子一樣的目標(biāo)在檢測和測量方面頗具挑戰(zhàn)性,因為與在多個方向上分散光的漫射目標(biāo)不同,類似鏡子的物體只能反射很小的聚焦光束,而不會直接反射到傳感器的接收器中。
同時,諸如路標(biāo)和車牌之類的可反光目標(biāo)將高百分比的光返回接收器,并且是LiDAR傳感器的良好目標(biāo)。由于存在這些差異,LiDAR傳感器的實際性能和最大有效范圍可能會根據(jù)目標(biāo)的表面反射率而有所不同。
2、關(guān)于LiDAR的知識
點云
點云是在同一空間參考系下表達(dá)目標(biāo)空間分布和目標(biāo)表面特性的海量點集合,在獲取物體表面每個采樣點的空間坐標(biāo)后,得到的諸多特征點的集合,稱之為“點云”(Point Cloud)。點云是由3D點數(shù)據(jù)組成的大型數(shù)據(jù)集,由激光測量原理得到。車載激光雷達(dá)產(chǎn)生的點云包含來自周圍環(huán)境的原始數(shù)據(jù),這些原始數(shù)據(jù)是從移動物體(例如車輛和人)以及靜止物體(例如建筑物,樹木和其他永久性結(jié)構(gòu))掃描而來的。然后可以通過軟件系統(tǒng)轉(zhuǎn)換包含數(shù)據(jù)點的點云,以創(chuàng)建給定區(qū)域的基于LiDAR的3D圖像。
激光測量得到的點云內(nèi)容包括三維坐標(biāo)(XYZ)和激光反射強度(Intensity),強度信息與目標(biāo)的表面材質(zhì)、粗糙度、入射角方向,以及儀器的發(fā)射能量,激光波長有關(guān)參數(shù)等。
FOV
FOV,是Field-of-View的英文縮寫,定義為傳感器覆蓋的角度(以度為單位)。通常,LiDAR傳感器的性能是在水平和垂直視場中測量的。所以,LiDAR的主要參數(shù)包括Vertical FOV和Horizontal FOV。
基于LiDAR與普通雷達(dá)以及攝像頭的感知系統(tǒng)有何不同
LiDAR和雷達(dá)均用于確定運動物體的速度,范圍和角度。雷達(dá)使用無線電波代替光,而相機則依靠數(shù)百萬個像素或兆字節(jié)來處理2D圖像。
與雷達(dá)不同,LiDAR可以提供周圍世界的完整實時3D圖像。此外,與攝像機不同,LiDAR不提供PII(個人識別信息)風(fēng)險,并且誤報率較低。LiDAR可以在確定目標(biāo)距離的同時創(chuàng)建目標(biāo)的圖像,從而提供目標(biāo)的3D視圖并精確計算目標(biāo)的運動方向,而相機和雷達(dá)都無法提供。
此外,無論是在黑暗中還是在雨天或雪天等天氣條件下,雷達(dá)或攝像機都無法準(zhǔn)確看到,這嚴(yán)重限制了它們的“視線”能力。LiDAR還可以提供一定范圍內(nèi)物體的表面測量和精確分辨率。
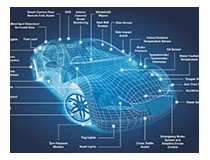
對于無人駕駛汽車,最強大且響應(yīng)迅速的安全傳感器系統(tǒng)將是全套LiDAR,雷達(dá),攝像機,其中LiDAR作為主要傳感器。

3、LiDAR在自動駕駛中的地位
與攝像機和雷達(dá)不同,LiDAR可以在白天或夜晚的任何光照條件下運行,這使其成為自動駕駛汽車必不可少的技術(shù)。攝像頭,雷達(dá)和其他技術(shù)可以在一定程度上幫助車輛“看到”周圍的環(huán)境。一旦天黑或下雨,攝像頭技術(shù)就無法提供汽車準(zhǔn)確看到并區(qū)分人與其他物體所需的高分辨率圖像。LiDAR仍然是唯一提供最高范圍精度和最佳角分辨率的傳感器,因此LiDAR對于確保乘客和行人的安全至關(guān)重要。
車用LiDAR種類
車用LiDAR可以分為機械式和固態(tài)式兩種。

目前,僅用于ADAS系統(tǒng)的機械式LiDAR已經(jīng)商業(yè)化量產(chǎn)。用于L4級別以上的機械LiDAR往往安裝與汽車頂部,進(jìn)行360°機械式旋轉(zhuǎn)掃描。但是機械掃描LiDAR會造成掃描盲區(qū),即汽車周圍近距離內(nèi)是視野盲區(qū)。另外,在長時間的使用過程中,電動機械件容易故障,從而易產(chǎn)生安全問題。

因此自動駕駛研究員開始研究固態(tài)激光雷達(dá)。
















站客服")


