




2、視覺傳感器
視覺傳感器的優(yōu)點(diǎn)是探測(cè)范圍廣、獲取信息豐富,實(shí)際應(yīng)用中常使用多個(gè)視覺傳感器或者與其它傳感器配合使用,通過一定的算法可以得到物體的形狀、距離、速度等諸多信息。或是利用一個(gè)攝像機(jī)的序列圖像來計(jì)算目標(biāo)的距離和速度,還可采用SSD算法,根據(jù)一個(gè)鏡頭的運(yùn)動(dòng)圖像來計(jì)算機(jī)器人與目標(biāo)的相對(duì)位移。但在圖像處理中,邊緣銳化、特征提取等圖像處理方法計(jì)算量大,實(shí)時(shí)性差,對(duì)處理機(jī)要求高。且視覺測(cè)距法檢測(cè)不能檢測(cè)到玻璃等透明障礙物的存在,另外受視場(chǎng)光線強(qiáng)弱、煙霧的影響很大。
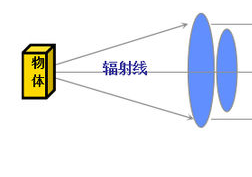
3、紅外傳感器
大多數(shù)紅外傳感器測(cè)距都是基于三角測(cè)量原理。紅外發(fā)射器按照一定的角度發(fā)射紅外光束,當(dāng)遇到物體以后,光束會(huì)反射回來,如圖所示。反射回來的紅外光線被CCD檢測(cè)器檢測(cè)到以后,會(huì)獲得一個(gè)偏移值L,利用三角關(guān)系,在知道了發(fā)射角度α,偏移距L,中心矩X,以及濾鏡的焦距f以后,傳感器到物體的距離D就可以通過幾何關(guān)系計(jì)算出來了。紅外傳感器的優(yōu)點(diǎn)是不受可見光影響,白天黑夜均可測(cè)量,角度靈敏度高、結(jié)構(gòu)簡(jiǎn)單、價(jià)格較便宜,可以快速感知物體的存在,但測(cè)量時(shí)受環(huán)境影響很大,物體的顏色、方向、周圍的光線都能導(dǎo)致測(cè)量誤差,測(cè)量不夠精確。
4、超聲波傳感器
超生波傳感器檢測(cè)距離原理是測(cè)出發(fā)出超聲波至再檢測(cè)到發(fā)出的超聲波的時(shí)間差,同時(shí)根據(jù)聲速計(jì)算出物體的距離。由于超聲波在空氣中的速度與溫濕度有關(guān),在比較精確的測(cè)量中,需把溫濕度的變化和其它因素考慮進(jìn)去。超聲波傳感器一般作用距離較短,普通的有效探測(cè)距離都在5-10m之間,但是會(huì)有一個(gè)最小探測(cè)盲區(qū),一般在幾十毫米。由于超聲傳感器的成本低,實(shí)現(xiàn)方法簡(jiǎn)單,技術(shù)成熟,是移動(dòng)機(jī)器人中常用的傳感器。
機(jī)器人避障技術(shù)的分類
目前移動(dòng)機(jī)器人的避障根據(jù)環(huán)境信息的掌握程度可以分為障礙物信息已知、障礙物信息部分未知或完全未知兩種。傳統(tǒng)的導(dǎo)航避障方法如可視圖法、柵格法、自由空間法等算法對(duì)障礙物信息己知時(shí)的避障問題處理尚可,但當(dāng)障礙信息未知或者障礙是可移動(dòng)的時(shí)候,傳統(tǒng)的導(dǎo)航方法一般不能很好的解決避障問題或者根本不能避障。而實(shí)際生活中,絕大多數(shù)的情況下,機(jī)器人所處的環(huán)境都是動(dòng)態(tài)的、可變的、未知的,為了解決上述問題,人們引入了計(jì)算機(jī)和人工智能等領(lǐng)域的一些算法。同時(shí)得益于處理器計(jì)算能力的提高及傳感器技術(shù)的發(fā)展,在移動(dòng)機(jī)器人的平臺(tái)上進(jìn)行一些復(fù)雜算法的運(yùn)算也變得輕松,由此產(chǎn)生了一系列智能避障方法,比較熱門的有:遺傳算法、神經(jīng)網(wǎng)絡(luò)算法、模糊算法等,下面分別加以介紹。
1、基于遺傳算法的機(jī)器人避障算法



















合作")
站客服")


