本文引用自作者:王鐘嶸 郭宏宇 麥 文
文章摘要
電子調速器是將直流電轉化成交流電驅動無刷電機的一種電子裝置,簡稱電調。它具有調速和功率驅動兩種基本功能。通常電調有3組功率場效應晶體管 (MOSFET)構成橋型驅動電路。由于電路中總是存在傳輸線路的差異、分布電容差異、器件延時差異等不確定因素影響,常常使得橋臂上下兩只MOSFET管的導通或截至時間不同步。極易出現同一個橋臂中上下兩只MOSFET出現短暫同時導通的情況,從而出現短時大電流脈沖。這個問題降低了電源效率,也容易使驅動管發熱損毀。
本文通過使用任意波函數發生器AFG對電子調速器進行驅動和測試,在精準測量出各路橋臂時延特性后,經過驅動軟件優化讓電路達到了最佳控制效果。泰克AFG31000任意波函數發生器可產生任意脈沖波,具有雙通道輸出和極高的相位控制能力,對精準測量起到了非常關鍵的作用,也為本文實現高效驅動器起到了重要作用。
一、引言
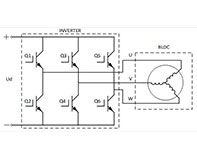
常見多旋翼無人機通常使用電子調速器作為電機的驅動部件,是一種比較常見的電機驅動裝置。電子調速器的主要通過PWM脈沖來實現三相激勵電流。典型的BLDC驅動如圖1.1所示。Q1-Q6是6個MOSFET組成的直流轉交流的逆變電橋,每只管子在驅動信號激勵下,有序開通和關閉,形成交流驅動源。

圖1.1 三相逆變橋結構圖
但是,由于實際電路總是存在一些未知影響因素。例如,驅動管輸入電容不一致、控制信號線長度不一致、驅動管開啟與關斷時延不一致等。使得一組橋臂的兩個MOSFET管的導通或截至的時間不同步,極易出現同一個橋臂的兩個管子同時導通的情況。當上下兩個MOSFET管同時導通時,盡管時間非常短暫也會形成極大的短路脈沖電流,導致電源效率下降,驅動管子發熱等現象,甚至損毀驅動管。
本文通過任意波函數發生器AFG對無刷電子調速驅動電路進行實驗測試解決驅動不一致問題。在精確測量出驅動信號經過每組MOS管所產生的時延后,根據所測的時延差數據,通過軟件進行調整和優化,最后使驅動電橋到達最優工作狀態。
二、電調硬件設計
如圖2.1所示,該部分為電子調速器A相輸出,驅動器使用了集成電路。圖2.2是完整實驗板PCB,可以發現制作PCB板的時候由于走線原因,A相驅動線是兩根不等長的線,A_H線較長,A_L線較短。

圖2.1 電子調速器A相驅動電路原理

圖2.2 電子調速器PCB
三、實驗測試與軟件優化
泰克AFG31000任意波函數發生器可以輸出雙路驅動信號,每個通道獨立可調整,將雙路輸出調整為可以激勵雙輸入模式,通過示波器觀察將激勵信號的在電路板上的驅動點位置將邊沿對齊。

圖3.1 雙通路高速示波器測試A_L端信號激勵點到電機接口時延
圖3.1中可以觀察到A_L端信號通過線路及驅動器件后產生的時延。信號在下降沿部分產生了彎曲變化,這可能是線路上分布電容引起的。對所有驅動端分別激勵并測量出每個通道的時延。表1給出了各個通道測量結果,可以看到B相和C相近似相等,A相最差。從PCB電路上可以發現A相兩路信號對稱性最差,B相和C相接近一致。A相有約2us的時延差別。
表1 各信號通路延時值測量