近兩年的趨勢預測中,似有許多媒體資料和分析機構提到了ToF(Time of Flight)技術的即將爆發,但卻似乎又后勁乏力的消息。比如有人認為掣肘ToF發展的主因是應用場景受限,所以ToF迄今似乎都沒有什么驚人的市場爆發現象。
在本文中,我們不想刻意琢磨統計機構的數據,而是嘗試從ToF技術本身的原理,及其在手機市場的應用出發,來探討這些年有關ToF技術的傳言是否可靠,尤其是在今年新版蘋果iPad Pro面世以后,后置新增的那個LiDAR模塊是否有機會帶動ToF技術發展;且包括華為手機在內的不少智能手機已經連續數年將ToF模組應用于前攝。
2015年ToF在手機上的發展
如果用簡單的話來解釋ToF,無非就是飛行時間(Time of Flight)。從我們翻閱的資料來看,ToF并不限于光學領域,利用微波、超聲波的“飛行時間”來計算對象距離的,都可以認為是ToF技術的應用。那么實際上普通的微波雷達也可說是應用了ToF技術的典型設備。如此,ToF涵蓋的技術領域也就變得非常廣,而且ToF存在的歷史又可以往前推幾十年。
若將ToF限制在光學測距范疇,則ToF也就特指“光的飛行時間”,這也是目前我們對于ToF的狹義理解方式,或者特指“ToF攝像頭”。相對簡單的解釋是:若要測得ToF模組與場景中某個對象(或某個點)的距離,則由ToF模組的光源向該對象發出光(子)。光在發出后抵達該對象,并反射回來,由ToF模組的傳感器獲得。計量此間“光的飛行時間”,在光速已知的前提下,即可得到距離數據,如圖1所示。
圖1
這是個十分簡化的模型,但也基本闡述了ToF技術的核心。而且它也至少透露了ToF模組在硬件實現上,至少需要包括發射端和接收端,當然另外還需要處理信號的芯片、算法與軟件。
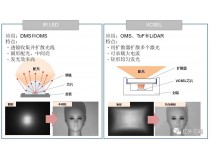
近兩年ToF話題火熱的主因,似乎是3D感知、3D視覺應用的崛起。典型的如iPad Pro所用的后置LiDAR激光雷達。這在我們探討的ToF范疇內,如果不考慮汽車LiDAR這種能量級別,則iPad Pro的ToF應用已經相對高級和復雜,看起來和消費用戶的距離似乎也稍遠。在談這種技術之前,不妨先看看更早以及更貼近生活的ToF應用。
手機對于“測距”的典型需求是前面板的距離感應:這是多年前功能機時代就存在的特性,即通過距離感應,在接打電話時,耳朵貼近屏幕就讓屏幕自動熄屏。早年的距離感應只通過簡單的一個光電二極管實現,這種簡單的方案在某些場景下會失效,因為它是通過測定外部亮度級變化實現所謂的“距離感應”的。
從2015年前后,主動光學測距開始應用到手機上:這種測距系統結合了一枚LED,與光傳感器。LED會主動發光,如果傳感器獲取到的反射光強度超過預設的閾值,手機就熄屏。這幾乎可以認為是ToF的雛形了,iPhone 6s時代已經在采用這種技術。從TechInsights的拆解分析來看,iPhone 7真正落實了ToF傳感器:即不再依賴于反射光強度級變化,而開始計量來自激光二極管的光子飛行時間。
更早將ToF模組應用于前面板的手機,可追溯至2014年的LG G3、黑莓Passport等。TechInsights的顯微拆解顯示,當時這些手機普遍開始應用意法半導體的早期VL6180方案。從分析來看,這是一個三合一的光學模組,其中包含了距離傳感器、環境光傳感器,以及VCSEL光源(垂直腔面發射激光器)。
圖2,來源:TechInsights