當產品有了原型,就可以進行HiL硬件在環的測試,這里有一個我們給某日系主機廠和供應商提供的攝像頭LKA系統HiL項目案例。我們知道,要充分測試LKA系統的性能,需要在大量的、不同車道狀態組合的工況下進行測試。道路測試很難遍歷不同的車道組合,比如不同轉彎半徑的車道,難以在真實道路上都找得到。這時候,毫無疑問,能夠輕易定制測試工況的HiL的測試效率遠超道路測試。
下一個案例,我想分享我們使用仿真產生的場景數據用于AI人工智能算法的優化迭代,PreScan場景工況測試能夠基于Nvidia PX的人工智能算法,進行可行駛區域Free Space Detection,也可以用來測試3D SLAM算法。這其中,有兩個重要的技術點:
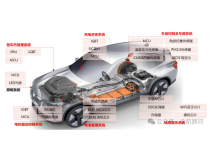
第一個,當今的人工智能駕駛技術越來越傾向于使用感知傳感器的原始數據進行數據融合,這也是PreScan環境感知傳感器的開發方向,盡量地提供原始數據輸出;
第二個,我們知道AI人工智能算法的訓練結果質量與測試工況的數量和覆蓋度相關,因此,為了彌補路采素材代表性不足的缺陷,可以使用仿真技術的路況可定制的優勢,生成仿真數據,加入訓練集中,可以提高算法訓練結果的質量。

當我們產品可以上市裝車的時候,車輛在環ViL就成為了一個手段。這是案例,是我們向上海某整車廠提供的基于毫米波雷達的ACC/AEB系統的ViL測試平臺。這樣的解決方案具有什么價值?以前,該主機廠主要是通過道路測試和主觀評價來進行性能的驗證,但這一手段具有一系列的缺陷。比如,測試工況沒有辦法去定制,定制之后很難精確的控制實現,實現之后也很難重現和重復測試,有時候,道路測試忙了一天,上百個測試工況下來,發現效果都不一定很好。而ViL車輛在環的方法順利的克服了上述難點,大大提高了測試效率。當然,PreScan也可以支持動態的駕駛模擬儀。
除了仿真測試技術,TASS也有豐富的道路測試經驗,我們是EuroNCAP組織授權的官方試驗場,有豐富的AEB/LDA/ISA等系統的法規測試經驗。在TASS荷蘭,我們還運營著基于7公里高速公路的自動駕駛試驗場,這是全球最早的自動駕駛道路試驗場。
基于此,我們也能輸出自動駕駛試驗場的設計技術。比如,在美國密西根大學的Mcity,就曾經使用PreScan進行試驗場的可視化設計和仿真測試應用。在ACM-America Center for Mobility,TASS向其提供了場地設計咨詢服務,Siemens和TASS也是ACM的緊密合作伙伴。

今天通過一些實際的案例,闡述了基于模型和以PreScan仿真技術為核心的自動駕駛系統正向開發、測試流程。
雖然仿真技術作為一種工具,帶來了很大的價值,但是也有很多的技術難點,我們可以舉幾個例子。
第一是場景的渲染能力,這是當前PreScan場景渲染質量的示意圖例,下一步我們會進一步提升我們的渲染能力,不排除利用Unreal等游戲引擎進行場景渲染,提高場景渲染質量。

第二,我們計劃逐步把測試工況里面的所有元素參數化,并將參數開放,可以用外部程序來控制,從而可以輕易地獲得自動生成的、大量的、不同類型的測試工況。
第三,環境感知傳感器的建模能力需要對傳感器物理原理的大量先驗知識和經驗,這也是PreScan仿真技術一直在全球領先的重要技術之一。
以攝像頭為例,我們可以仿真從光源、傳播媒介、目標表面材質、光進入鏡頭、到達成像器件、甚至后續的AD轉換等等成像的所有物理環節。最終的實際效果是非常好的。
以毫米波雷達為例,我們知道毫米波雷達的感知特性,首先是感知精度和分辨率的問題,然后是目標的反射回的能量的問題,隨后還有一系列的常見缺陷特性:漏檢測、誤檢測、目標分列、過大的延遲等問題。我們還計劃發布對雷達天線發射和接收端的性能模型。