【儀商網-儀器儀表知識】激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。
激光雷達的種類是按照什么劃分的?
根據方向劃分:
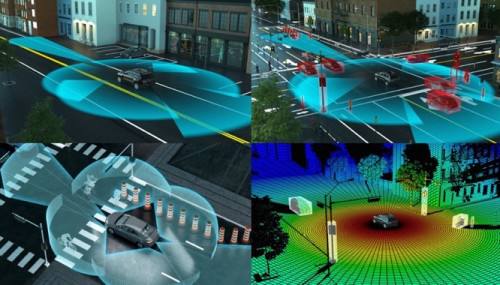
激光雷達的方向可以是最低點、天頂或側面。例如,激光雷達高度計往下看,大氣激光雷達往上看,而基于激光雷達的防撞系統要往側面看。
根據平臺劃分:
激光雷達應用可分為機載和地面兩種類型。這兩種類型需要根據數據用途、要捕獲的區域大小、所需測量范圍、設備成本等不同要求,使用不同規格的激光掃描儀。星載平臺也是可能的,可以參考衛星激光測高。
激光雷達種類:
機載激光雷達
機載激光雷達(也稱機載激光掃描)是一種激光掃描儀,在飛行過程中連接到飛機上,創建一個3D點云地形模型。這是目前替代數字攝影測量法的最詳細和準確的創建數字高程模型的方法。與攝影測量法相比,機載激光雷達的一個主要優勢是能夠從點云模型中濾除植被反射,從而創建一個數字地形模型,該模型表示被樹木掩蔽的地表,如河流、道路、文化遺產地等。在機載激光雷達的范疇內,有時會在高海拔和低海拔應用之間進行區分,但主要區別是在較高海拔下獲取的數據的準確性和點密度都降低了。機載激光雷達還可用于在淺水中創建測深模型。
機載激光雷達的主要組成部分包括數字高程模型(DEM)和數字表面模型(DSM)。點和地面點是離散點的矢量,而DEM和DSM是離散點的插值柵格網格,這個過程還包括拍攝數字航空照片。為了解釋深層滑坡,例如,在植被覆蓋下,使用陡坎、張力裂縫或傾斜樹木的變化,可以使用機載激光雷達。機載激光雷達數字高程模型可以穿透森林覆蓋層,對陡坎、侵蝕和電線桿傾斜進行詳細測量。
機載激光雷達數據處理使用的工具箱稱為激光雷達數據過濾和森林研究工具箱(TIFF),可用于激光雷達數據過濾和地形研究軟件,使用該軟件將數據插值到數字地形模型。激光指向要繪制地圖的區域,通過從相應的數字地形模型高程中減去原始z坐標,計算出每個點的離地高度。基于此離地高度,可獲得非植被數據,該數據可能包括諸如建筑物、電線、飛鳥、昆蟲等之類的對象。其余點作為植被處理,用于建模和制圖。在這些圖中,激光雷達的指標是通過計算平均值、標準差、偏度、百分位數、二次平均值等統計數據來計算的。
機載激光雷達測深儀
機載激光雷達測深技術系統包括測量信號從信號源到返回傳感器的飛行時間。數據采集技術包括一個海底測繪組件、一個視頻橫斷面和一個采樣的地面真實度組件。它使用綠色光譜(532nm)的激光束工作。兩束激光投射到快速旋轉的反射上,形成一個點陣列。其中一根光束穿透水,并在有利條件下探測水的底面。
所獲得的數據顯示了暴露在海底之上的陸地表面的全部范圍。該技術非常有用,因為它將在主要的海床制圖程序中發揮重要作用。該地圖測繪出了陸地地形和水下高程。海底反射成像是該系統的另一種解決方案產品,有利于繪制海底生境圖,這項技術已用于使用水文激光雷達對加利福尼亞水域進行三維圖像制圖。
無人機現在正與激光掃描儀以及其他遙感器一起使用,作為掃描較小區域的一種更經濟的方法。無人機遙感的可能性還消除了載人飛機機組人員在困難地形或偏遠地區可能遭受的任何危險。
地面激光雷達