在過去的幾年中,我們已經看到了人工智能(AI)的真正成熟。從自動工廠到無人駕駛汽車,卡車再到機器人司機,人工智能的諸多好處顯而易見-無論是提高效率和盈利能力,還是改善生活質量。自動化機器的日益普及的一個關鍵特性是它們能夠精確地測量位置和運動。
盡管可以通過不同的技術來測量位置,但我們看到的一種新興技術是感應式位置傳感器。該方法準確,經濟高效,并且具有良好的抗噪能力。
但是,由于存在某些誤解,阻礙了這項技術的應用。在這里,我們試圖通過將感應式位置傳感器,包括霍爾效應和磁阻傳感器在內的可比較傳感器技術并列來消除這些誤解。

誤解1:電感式傳感器使用電感來測量位置
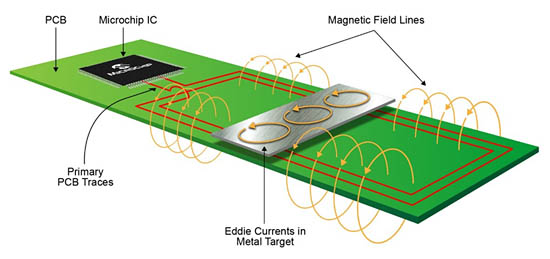
盡管電感式傳感器的名稱可能誤導人們以為它測量電感,但其實際功能卻大不相同。感應傳感器通過使用金屬目標中磁場的電磁感應來工作。而且,它使用法拉第定律的原理和空心變壓器的已知特性來精確定位該磁場的干擾。用簡單的語言來說,感應傳感器通過測量導電目標對磁場的干擾來工作。
與依賴于永磁體產生的磁場的霍爾效應傳感器和磁阻傳感器不同,感應傳感器使用的是變壓器初級繞組產生的磁場。在此,將金屬靶置于該磁場中,從而感應出渦流,抵消了磁場的影響,從而使靶的場強降至零。我們使用兩個放置在不同物理位置的次級線圈來檢測磁場。由于它們的位置不同,它們各自將檢測到不同的電壓。我們可以計算兩個接收線圈電壓的比率,以確定目標的位置。
誤解2:感應式位置傳感器無法準確測量位置
實際上,感應式位置傳感器非常精確,特別是在其他基于磁體的系統顯示次優性能的較高溫度下。
首先,它們僅取決于自生磁場的干擾,而不受永磁體非線性特性的影響。這有助于在室溫下將整個測量范圍內的誤差保持在+/-0.1%以下。即使在溫度變化且目標與傳感器之間存在氣隙的情況下,誤差范圍也可以保持在+/-0.3%以下。同樣,算法被設計為使得溫度變化具有最小的影響。例如,當電感式位置傳感器使用LC振蕩器以1到6 MHz的頻率激發磁場時,對位置沒有影響。主振蕩器在輔助接收通道中引起同步解調,但不會影響接收信號的幅度。
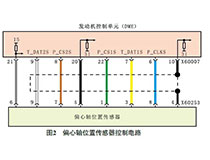
但是,考慮到傳感器附近的金屬物體對磁場的影響,可能需要進行一些校準。這個校準與溫度變化無關。使用八個校準段的13位模數轉換器(ADC)和32位處理器或Microchip Technology的LX3302A可幫助消除任何計算和量化誤差。
誤解3:電感式位置傳感器的性價比不高
盡管人們普遍認為,負擔能力是以高性能為代價的,但對于感應式傳感器卻并非如此。例如,對于霍爾效應和磁阻傳感器,要獲得良好的精度,必須使用具有適當公差和強度的永磁體。該磁體需要專門制造,這增加了成本。
相比之下,電感式傳感器僅需要一塊金屬作為目標。當然,電感式傳感器需要更大的PCB來布線傳感器走線。但是,較大的PCB成本低于磁鐵。實際上,如果您有未使用的現有PCB空間,則可以消除此成本。與其他解決方案相比,這使得電感式位置傳感器更具成本效益。
誤解4:對外部磁場的敏感性
與霍爾效應傳感器和磁受體傳感器不同,感應位置傳感器使用主動解調來抑制由自動機產生的雜散磁場。
讓我們以具有多個系統的下一代電動汽車為例,例如無刷直流(BLDC)電動機,電子助力轉向和產生雜散磁場的制動輔助電動機。隨著這些雜散磁場的增加,它提出了對新規范的需求,這些規范要求在更高的磁場下進行更多的抗擾度測試。當汽車電子設備在EMC認證期間受到4mT DC磁場的影響時,無論是動力轉向,加速踏板,牽引轉子位置,任何對安全至關重要的傳感器都不會出現錯誤讀數。由于感應式位置感測僅過濾其需要感測的頻率,因此不受其他噪聲的影響;與霍爾效應和磁阻傳感器不同。
另外,由于它不使用任何磁性材料,因此它不可能吸收任何直流磁場。
誤解5:感應式位置感應是基于新技術的
盡管感應式位置傳感器提供了一種實現感應的新方法,但其基礎技術已廣為接受。感應式位置感應使用的原理與線性電壓差動變壓器(LVDT)密切相關。LVDT在機器人應用中使用一個初級線圈和兩個次級線圈來檢測金屬軸的位置,而電感式位置傳感器使用的技術相同,盡管只是PCB形式。電磁分解器也使用類似的技術。
無論是LVDT,旋轉變壓器還是電感式傳感器,它們都使用由導電元件對磁場的干擾所感應的兩個電壓之比來感應位置。
誤解6:由于冗余感應傳感器,所需空間增加了一倍