




石油化工廠的氣體泄漏檢測不僅危險而且耗時,還很容易受到人為錯誤解釋的影響。為了提供更安全、更高效、更可靠的檢測解決方案,德國某公司和研究所共同開發(fā)RoboGasInspector系統(tǒng),通過自主移動檢查機器人來遠程檢測和定位氣體泄漏。
危險場所傳統(tǒng)檢測的局限性
在化工廠、煉油廠及氣體壓縮站等,操作員始終要把員工和生產(chǎn)設(shè)施的安全視為頭等大事。尤其是在那些使用有毒或爆炸性氣體的場所,高度的警覺性和嚴謹?shù)牟僮饕?guī)范是不可或缺的。正因如此,化學(xué)工業(yè)、沼氣設(shè)施以及氣體供應(yīng)行業(yè)都遵循著嚴格的檢測標準。為了確保安全,預(yù)防性檢查計劃往往要求工作人員每天執(zhí)行一系列詳盡而耗時的常規(guī)檢查。

定期檢查多依賴人工感官和經(jīng)驗,而新型檢測系統(tǒng)追求自動化、安全監(jiān)控與自主響應(yīng)能力,旨在通過創(chuàng)新技術(shù)與管理系統(tǒng)的結(jié)合,提升檢測效率、擴大覆蓋范圍,同時減少人為疏忽,實現(xiàn)經(jīng)濟高效并減輕人工常規(guī)任務(wù)負擔。
創(chuàng)新機器人系統(tǒng)的優(yōu)勢
RoboGasInspector是一款專為工業(yè)設(shè)施氣體泄漏檢測設(shè)計的創(chuàng)新機器人系統(tǒng),它旨在提供更安全、高效、可靠的檢測方案。這款機器人由德國多家公司和研究所聯(lián)手打造,作為德國技術(shù)計劃AUTONOMIK的一部分,它采用了先進的FLIR GF320光學(xué)氣體成像紅外熱像儀。該系統(tǒng)能夠自主移動,在大型工業(yè)設(shè)施中執(zhí)行氣體泄漏檢測和定位任務(wù),無需工作人員直接進入危險區(qū)域,甚至可以在無人值守的情況下工作。

RoboGasInspector由三個模塊組成:鏈條驅(qū)動移動平臺、導(dǎo)航模塊和檢測模塊,注意單元頂部的FLIR GF320。
無論是常規(guī)檢查還是針對特定系統(tǒng)部件的目標檢查,RoboGasInspector都能輕松應(yīng)對。其獨立移動性得益于多種導(dǎo)航傳感器的應(yīng)用,并可通過遙控進行手動干預(yù)。此外,結(jié)合視頻和光學(xué)氣體遙測技術(shù),該系統(tǒng)還能檢查以往因難以接近而遺漏的系統(tǒng)部件。
RoboGasInspector系統(tǒng)的構(gòu)成
首次演示RoboGasInspector是在卡塞爾大學(xué)的一間大廳內(nèi)進行的。該機器人獨立完成了檢測路線,過程中成功跨越了障礙物和斜坡。在指定的檢測點,它對多條管道進行了檢查,并發(fā)現(xiàn)了一處甲烷泄漏。在接下來的幾個月里,這一成果在實驗室條件下被擴展應(yīng)用于數(shù)平方公里的大型工業(yè)設(shè)施中,其中考慮了諸如風(fēng)和陽光等環(huán)境因素,以及系統(tǒng)運行產(chǎn)生的干擾因素。

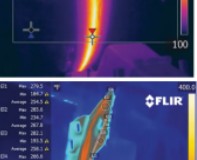
FLIR GF320將泄漏點的不可見氣體可視化為黑色的煙柱
RoboGasInspector由三大模塊構(gòu)成:鏈式驅(qū)動平臺、導(dǎo)航模塊及檢測模塊。鏈式驅(qū)動平臺搭載電動驅(qū)動和常規(guī)電池,提供移動能力。導(dǎo)航模塊配備前后2D激光掃描儀和GPS系統(tǒng),實現(xiàn)室內(nèi)外精準定位,并與數(shù)字地圖實時對比,標注障礙物和封閉區(qū)。Kroll教授指出,2D激光掃描儀使RoboGasInspector能避開車輛、托盤、油桶等障礙物,甚至行人,確保路徑暢通。
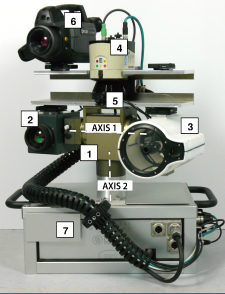
多傳感器檢查模塊:平移-傾斜單元(1)紅外熱像儀(2)、主動式TDLAS測量裝置(3)、激光測距儀(4)、攝像機(5)、用于氣體可視化的FLIR GF320紅外熱像儀(6)、計算機和其他電氣/電子模塊安裝在開關(guān)柜(7)中。
檢測模塊在云臺裝置上集成了多種計量儀器,其中包括一款基于可調(diào)諧二極管激光吸收光譜(TDLAS)技術(shù)的遠程甲烷泄漏檢測儀(RMLD),還配備了FLIR GF320光學(xué)氣體成像熱像儀,用于可視化氣體。為確保RoboGasInspector本身不會帶來風(fēng)險,它還內(nèi)置了氣體傳感器,當環(huán)境中可燃氣體濃度達到下爆炸極限(LEL)的10%時,傳感器將關(guān)閉整個系統(tǒng),從而避免對可燃環(huán)境造成潛在危險。

傳感器系統(tǒng)的平移范圍(俯視圖)和傾斜范圍(仰視圖)
氣體泄漏檢測的全新選擇




















站客服")


