自動駕駛仿真主要是利用數學建模的方式將實際應用場景進行數字化還原,建立一個盡可能接近真實世界的系統模型,無需實車直接通過軟件便可實現對自動駕駛系統及算法的測試驗證目的。
不過,是德科技也指出,軟件測試雖然有非常高的效率,但是面對真實應用的環境,差距仍比較大,并且技術挑戰也比較高。
總體來看,現階段自動駕駛仿真挑戰主要有三大方面,一是對現實世界的模擬程度,二是場景庫的構造,三是仿真與算法的迭代部署及提升,難度都不容小覷。
那么,如何去平衡這些矛盾?換句話說,如何取代繁復的實車路測,建立一套優秀的仿真環境,能夠精確完成自動駕駛功能和安全等驗證,從而真正保障自動駕駛的順利落地?
對此,是德科技以AI技術在汽車應用領域中的測試場景為例,在現場展示了一套智能網聯駕駛仿真測試解決方案——由無線綜測儀UXM以及GNSS信號模擬器組成,支持4G/5G/C-V2X以及一致性測試,同時支持物理層、協議層以及應用層測試,上層場景搭載IPG的CarMaker軟件,支持開閉環測試、Day 1/2標準場景及自定義場景。
此外,該方案支持搭載Nordsys WaveBee系統,整個系統包括開發平臺、車載單元、路邊單元(ITS 站)、仿真、可視化和分析等功能。
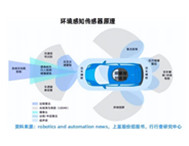
當然,在仿真環境的搭建過程中,各種傳感器信號的模擬也是一大難點,如V2X、毫米波雷達、激光雷達等。作為智能駕駛汽車的“眼睛”,傳感器對周圍環境信息的感知能力對高級自動駕駛至關重要。
目前行業關于自動駕駛仍有很多的技術路徑尚未確定,且都是在感知層面。比如特斯拉堅定“純視覺”感知路線,新款Model 3移除了所有雷達,日前博世也放棄了激光雷達的研發等。而無論是哪種傳感器,從仿真角度看,理論上涉及對物理信號進行仿真、對原始信號進行仿真和對傳感器目標進行仿真三個層級。
是德科技也表示,不同的公司可能會采取不同的技術路線。是德科技作為一家以軟件為中心,并不斷強化設計、仿真和測試能力的公司,主要還是與客戶一起不斷地去預測技術的發展,提供不同的解決方案,助力其在不同的技術下都能完成這樣的測試。
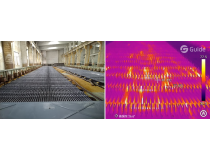
據Marie Hattar介紹,是德科技推出的雷達場景模擬器可以同時模擬512個目標的雷達場景,進而去模擬汽車里面不同傳感器的運作方式。這對未來自動駕駛汽車測試的重要性不言而喻。
值得一提的是,在本年度技術盛會上,是德科技現場也展示了一個黑科技平臺——雷達場景模擬器,可以達到目標信號的實時仿真。該仿真器最小探測距離可達到1.5米,能包攬道路上難以仿真的一些危險場景,并且也具備針對多個目標同時反射的特性等。