




對(duì)于自動(dòng)駕駛來說,需要眾多傳感器對(duì)周圍物體進(jìn)行探測(cè)感知,還需要解決高精定位的問題。高精定位包含相對(duì)定位和絕對(duì)定位兩層含義,相對(duì)定位指的是車與周圍環(huán)境之間的相對(duì)位置,絕對(duì)定位指的是車本身的經(jīng)緯度。
GPS可以為車輛提供精度為米級(jí)的絕對(duì)定位,相對(duì)定位就需要IMU來實(shí)現(xiàn),IMU通常由陀螺儀、加速度計(jì)和算法處理單元組成。IMU通常與GPS聯(lián)合使用,尤其當(dāng)汽車處于城市樓宇、商場(chǎng)等GPS信號(hào)容易缺失的環(huán)境中,IMU可以發(fā)揮輔助作用。IMU被認(rèn)為是自動(dòng)駕駛系統(tǒng)在定位領(lǐng)域的最后一道防線,因此,高精度的陀螺儀對(duì)于保證自動(dòng)駕駛安全具有重要意義。
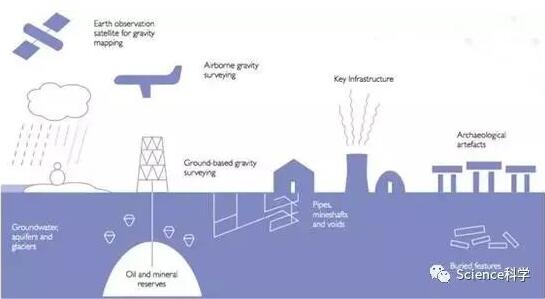
用于土木工程中的地下勘測(cè)
大樓、鐵路、核電站等大型項(xiàng)目在開始建造之前,都需要探測(cè)地下環(huán)境,以檢查是否會(huì)出現(xiàn)下水道、礦井等之類的危險(xiǎn)。現(xiàn)有的雷達(dá)、電子檢測(cè)儀和磁力儀等,對(duì)于超過地下幾米的物體有時(shí)候就很難探測(cè)到了。遇到這種情況,通常的解決方案就是使用重力感測(cè)技術(shù),因?yàn)榈叵侣癫氐娜魏挝矬w的重力發(fā)生細(xì)微的變化都可以被記錄下來并繪制成重力圖。
傳統(tǒng)重力儀的問題是讀數(shù)不準(zhǔn)確、耗時(shí)長(zhǎng)且易于受到地面振動(dòng)的影響。但如果用量子傳感器來進(jìn)行重力測(cè)量就會(huì)有明顯的優(yōu)勢(shì):速度更快、讀數(shù)更精確、探測(cè)的更深且不受地面振動(dòng)的影響。
除了以上提到的領(lǐng)域,隨著量子研究的發(fā)展,量子傳感器在航空、氣候、建筑、國(guó)防、能源、醫(yī)療保健、安全、運(yùn)輸?shù)阮I(lǐng)域也有廣闊的發(fā)展空間。
注:資料來源于Science科學(xué)



















合作")
站客服")


