Q:六維力矩傳感器的技術難點在哪里?
A:六維力矩傳感器技術難度主要體現在其能夠同時測量三個方向的力(三維力)以及圍繞 XYZ 軸旋轉的三個扭矩(三維扭矩)要實現這一目標,需要將三個一維力傳感器與三個扭矩傳感器結合設計,其中基礎原理依賴于應變片和電橋兩個核心元件。應變片會因為受力產生形變從而改變電阻值,而電橋則通過比較不同臂上的電壓差來計算出應變片的形變程度,進而推算出所受力的大小和方向。
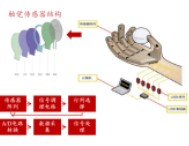
Q:六維力矩傳感器是什么,為何在人形機器人中備受關注?
A:六維力矩傳感器是一種用于測量力和扭矩的傳感器,它是機器人中不可或缺的組成部分,相當于人形機器人的神經系統。在人形機器人中,六維力傳感器用于腳踝和手腕處,用于感知和控制機器人行走、動作等動態過程。根據我們的測算,一臺人形機器人中大約需要四個六維力傳感器,總價值量在 4000 到 8000 元之間,這顯示了其較高的附加價值和市場需求。
Q:六維力矩傳感器的工作原理具體是怎樣的?
A:六維力矩傳感器的工作原理基于應變片和電橋技術。當傳感器受力發生形變時,應變片的電阻值會發生相應變化,通過測量電壓變化可計算出形變程度,進而得知所受力的大小和方向。電橋的作用是將多個應變片組成的網絡與測量電壓連接起來,通過比較各臂上的電壓差來精確測量力的大小和扭矩的分布。在實際應用中,六維力傳感器會根據具體需求采用單臂式或雙臂式電橋結構,以實現對復雜動態力矩的有效檢測與控制。
Q:為什么這個傳感器可以測量六維力?
A:因為傳感器設計為十字架結構,它不僅在 XYZ 三個軸上有感應,而且通過側面放置的應變片可以感知扭轉或扭曲等其他三個維度的力,因此能夠全面反映物體在三維空間中的受力情況。
Q:六維傳感器的基本工作原理是什么?
A:六維傳感器基于十字架梁結構,其中在每個面片上貼有應變片。當上下拉伸該結構體時,由于面片與梁的緊密貼合,若梁因受力發生形變,則應變片會同步發生形變,從而導致電壓變化,通過檢測這些電壓變化可以得知不同方向上的力大小,實現六維力的測量。
Q:六維傳感器的應用場景有哪些?
A:這種傳感器主要應用于柔順控制領域,例如協作機器人中當與外界接觸時能敏感感知并響應力的變化,實現被動柔順控制。此外,由于其高靈敏度和精度,也廣泛應用于航空、仿生醫學核設備以及手術機器人等高端領域。
Q:六維力傳感器制作難點在哪里?
A:六維力傳感器難以制作的主要原因在于它的高度敏感性,需要能精確感知各個方向上的力。這種敏感性在實際應用中帶來了解耦設計的挑戰,即當在某一方向施加力時,其他方向也會產生相應形變(耦合現象),而要準確反推出每個獨立方向的壓力(解耦)則變得極為困難,尤其是當需要處理多個軸向數據時。
Q:如何解決六維力矩傳感器的解耦問題?
A:為了解耦問題,目前主要有兩種方法。一種是通過結構解耦即通過精心設計傳感器結構來降低集成度,理論上可以通過四十多個獨立的一維傳感器實現六維力矩的效果,但這種方法會導致體積增大。另一種方法則是尋求更高集成度的解決方案,雖然目前還沒有明確說明具體實現方式,但暗示了未來可能通過更先進的技術來解決解耦難題。
Q:六維力矩傳感器在設計上如何通過結構改進來降低生產難度?
A:我們可以通過設計非鏡像的三梁結構來改善六維力傳感器的布局,使其在中間狀態時也能降低結構的復雜性,從而在一定程度上降低生產難度。
Q:算法結構對六維力矩傳感器技術難度的影響是什么?
A:算法結構導致了額外的技術難度,因為解耦算法需要解決一個具有不確定解的非線性方程組。傳感器的非線性問題以及標定過程中的一致性要求高,都是該領域內重要的技術挑戰。
Q:為什么六維力矩傳感器的生產加工要求如此之高?
A:六維傳感器上貼有四十多個芯片,生產過程極其復雜,對一致性的要求極高。如果一致性低,解耦算法在不同產品批次間可能無法適用,這要求整個生產過程必須保證極高的加工精度和一致性。
Q:六維力矩傳感器為何成本高昂?
A:主要原因在于其生產和標定過程中的低效與復雜性,傳感器需要人工在顯微鏡下操作完成貼音面片等工序,且標定設備要求極高,這些因素共同推高了六維力傳感器的成本。
Q:六維力矩傳感器的應用領域有哪些?