




01 人形機(jī)器人中有哪些傳感器?
傳感器是能夠把特定的信息(物理、化學(xué)、生物)按轉(zhuǎn)換成某種可用信號(hào)輸出的器件和裝置,一般由敏感元件、轉(zhuǎn)換元件和基本電路(也稱轉(zhuǎn)換電路)組成。敏感元件感受被測(cè)量的狀態(tài),轉(zhuǎn)換元件將相應(yīng)的被測(cè)量轉(zhuǎn)換成電參量,而基本電路將電參量接入電路并轉(zhuǎn)換成電量。傳感器的核心部分是轉(zhuǎn)換元件,其決定了傳感器的工作原理。
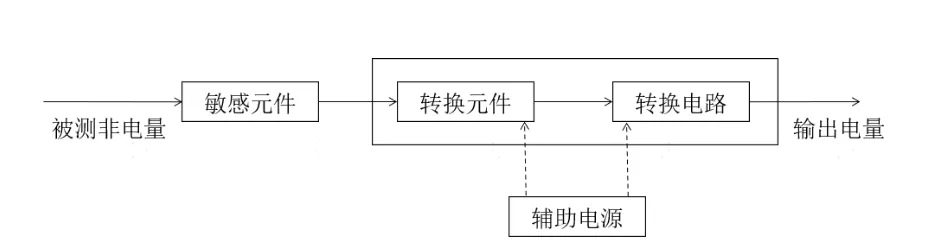
圖1:傳感器基本構(gòu)成與工作原理示意圖
人形機(jī)器人由控制、感知和執(zhí)行三大部分組成,其中感知是控制和執(zhí)行的前提,因此傳感器是人形機(jī)器人中核心的感知部件,人形機(jī)器人需要通過傳感器實(shí)現(xiàn)對(duì)外界光、力、聲、電等信息的感知,為控制和執(zhí)行提供實(shí)時(shí)反饋。
多數(shù)工業(yè)或移動(dòng)機(jī)器人應(yīng)用的傳感器相對(duì)較少,如移動(dòng)機(jī)器人使用視覺、激光雷達(dá)進(jìn)行導(dǎo)航或避障,協(xié)作機(jī)器人使用力矩傳感器做力反饋、利用視覺進(jìn)行分揀與檢測(cè)等,而人形機(jī)器人則需要綜合使用各類傳感器,對(duì)傳感器的需求量大、種類多。根據(jù)特斯拉機(jī)器人Optimus成本估算,各類傳感器占總成本比率超27%,是人形機(jī)器人主要核心零部件。
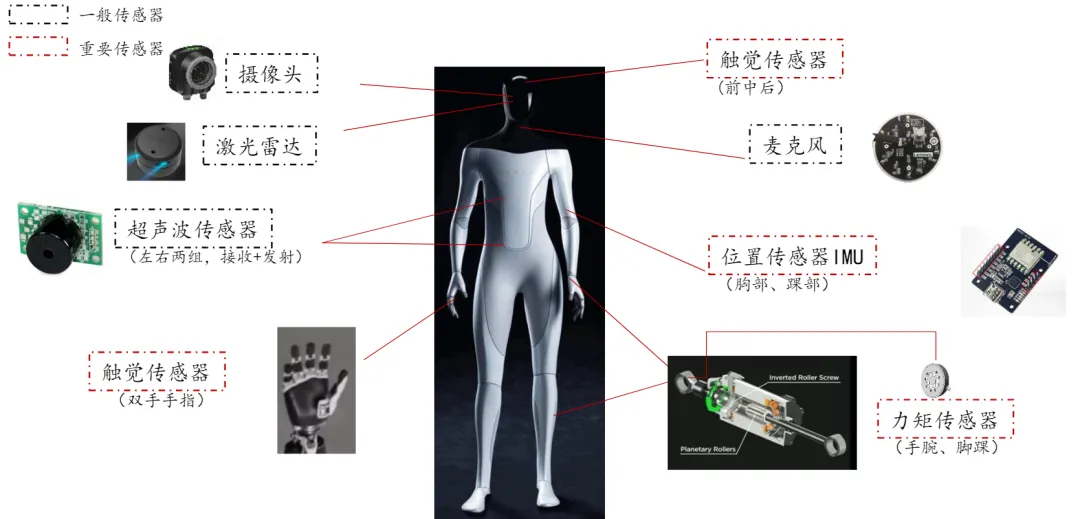
圖2:人形機(jī)器人中用到的傳感器(概覽)
傳感器種類眾多,并且可以按照輸入量、轉(zhuǎn)換原理、輸出信號(hào)、輸入和輸出的特征、能量轉(zhuǎn)化方式、應(yīng)用范圍等多種方式分類。例如,按照輸入量,可分為物理量、化學(xué)量、生物量傳感器;按照轉(zhuǎn)換原理,可分為結(jié)構(gòu)型、物性型、復(fù)合型傳感器;按照應(yīng)用范圍,可分為位置、力、液面、能耗、速度、溫度等傳感器。
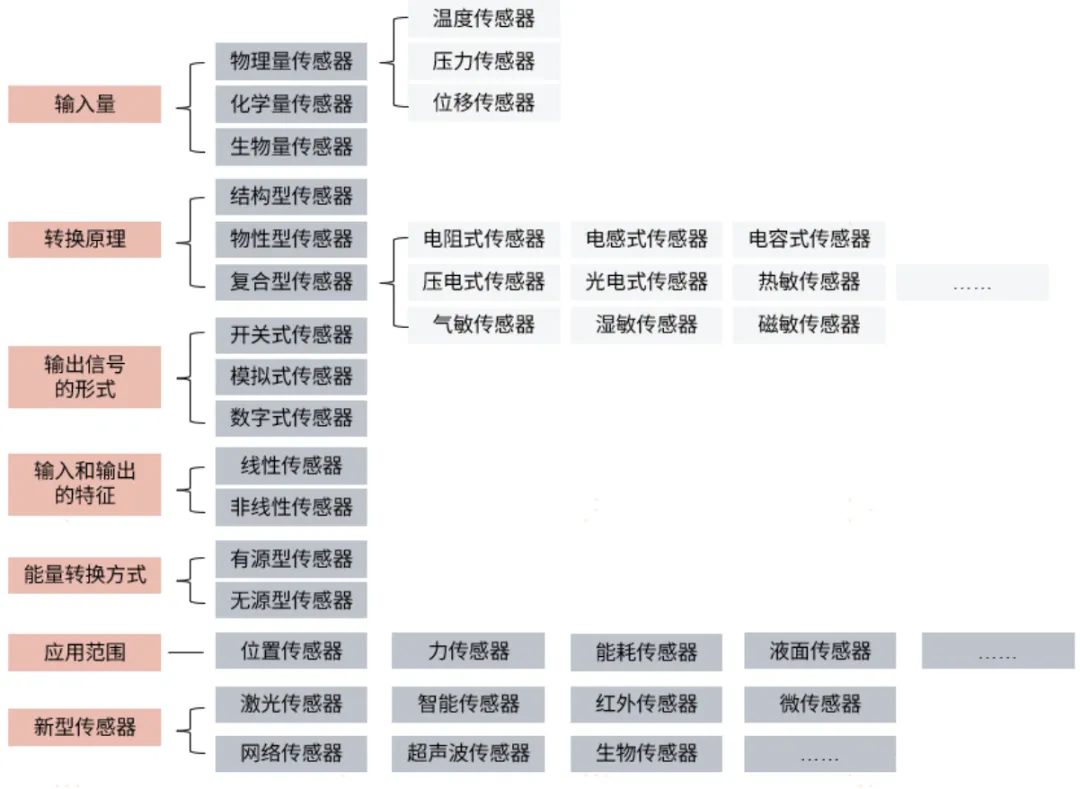
圖3:傳感器的整體分類
具體到機(jī)器人身上,根據(jù)檢測(cè)對(duì)象的不同可分為內(nèi)部傳感器(或稱為本體感知傳感器)和外部傳感器。內(nèi)部傳感器主要用來檢測(cè)機(jī)器人本身狀態(tài),多為檢測(cè)位置和角度的傳感器,常見如陀螺儀(用于測(cè)量和維持方向)、加速度計(jì)(測(cè)量加速度)等。
外部傳感器主要用來檢測(cè)機(jī)器人所處環(huán)境及狀況的傳感器,幫助機(jī)器人檢測(cè)和識(shí)別周圍的物體、距離、溫度、光線等信息。常見如攝像頭(提供視覺數(shù)據(jù))、雷達(dá)(檢測(cè)物體距離和速度)、激光測(cè)距儀(精確測(cè)量距離)、紅外傳感器(檢測(cè)熱源和距離)、超聲波傳感器(用于測(cè)距和避障)等。
02 內(nèi)部傳感器
內(nèi)部傳感器中,目前應(yīng)用最多和最廣泛的是慣性測(cè)量單元(Inertial Measurement Unit,IMU),它是一個(gè)包含加速度計(jì)和陀螺儀的單一集成單元,典型配置通常包含三個(gè)軸向的陀螺儀和三個(gè)軸向的加速度計(jì),可以測(cè)量物體在三維空間中的角速率和加速度,然后進(jìn)行數(shù)據(jù)處理,求解輸出物體的速度、位置與姿態(tài)。根據(jù)結(jié)果,實(shí)時(shí)調(diào)整從而實(shí)現(xiàn)機(jī)器人本體精確的運(yùn)動(dòng)軌跡規(guī)劃。

圖4:IMU工作原理
根據(jù)芯動(dòng)聯(lián)科招股說明書,IMU的BOM成本拆分中陀螺儀的成本最高,占比77.65%,其次為加速度計(jì)。慣性傳感組合和技術(shù)服務(wù)的成本占比較低。主要壁壘硬件端在于陀螺儀,軟件端為算法控制和軟件集成。
陀螺儀主要包括激光陀螺儀、光纖陀螺儀和 MEMS陀螺儀,但對(duì)人形機(jī)器人來說最常用的解決方案是MEMS陀螺儀,相較于國(guó)內(nèi),國(guó)外MEMS慣性技術(shù)經(jīng)二十多年的理論與實(shí)踐,技術(shù)更加成熟,眾多科研單位及公司如 Honeywell、ADI、Sensonor、Silicon Sensing、Colibrys 等公司都有成熟的商業(yè)化應(yīng)用,占據(jù)市場(chǎng)的主導(dǎo)地位。
03 外部傳感器
3.1
力矩傳感器


















合作")
站客服")


