與其他導航系統相比,慣導系統同時具有信息全面、完全自主、高度隱蔽、信息實時與連續,且不受時間、地域的限制和人為因素干擾等重要特性,可在空中、水中、地下等各種環境中正常工作。
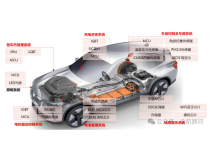
例如,IMU的上述優勢,在自動駕駛系統中表現的尤為明顯。在自動駕駛系統中,IMU可作為其他傳感器數據缺失時的有效補充。通過計算車輛的姿態(俯仰角和滾動角)、航向、速度和位置變化,IMU可用于填補GNSS信號更新之間的空白,甚至可在GNSS和系統中的其他傳感器失效時,進行航位推算。因此,作為一個獨立的數據源,IMU可用于短期導航,并驗證來自其他傳感器的信息。
有人說,自動駕駛系統在定位領域的最后一道防線是IMU,主要原因有三個:
首先,IMU對相對和絕對位置的推演沒有任何外部依賴,是一個類似于黑匣子的完備系統;相比而言,基于GPS的絕對定位依賴于衛星信號的覆蓋效果,基于高精地圖的絕對定位依賴于感知的質量和算法的性能,而感知的質量與天氣有關,都有一定的不確定性。
其次,同樣是由于IMU不需要任何外部信號,它可以被安裝在汽車底盤等不外露的區域,可以對抗外來的電子或機械攻擊;相比而言,視覺、激光和毫米波在提供相對或絕對定位時必須接收來自汽車外部的電磁波或光波信號,這樣就很容易被來自攻擊者的電磁波或強光信號干擾而致盲,也容易被石子、刮蹭等意外情況損壞。
最后,IMU對角速度和加速度的測量值之間本就具有一定的冗余性,再加上輪速計和方向盤轉角等冗余信息,使其輸出結果的置信度遠高于其它傳感器提供的絕對或相對定位結果。
總而言之,在自動駕駛紛繁復雜無法窮舉的工況中,IMU以其超高的置信度、完全無需外部依賴的特性,以及強大的抗干擾能力,像一顆定海神針,為自動駕駛的定位系統提供最后一道安全保障。