慣性測量單元(Inertialmeasurementunit,簡稱IMU)被定義為“無需外部參考的可測量三維線運動及角運動的裝置”,即測量物體三軸姿態角(或角速率)以及加速度的裝置。

慣性測量單元
IMU的組成
IMU由三個單軸的加速度計和三個單軸的陀螺儀組成,加速度計用來檢測物體在載體坐標系統獨立三軸的加速度信號,而陀螺儀用來檢測載體相對于導航坐標系的角速度信號、測量物體在三維空間中的角速度和加速度,并以此解算出物體的姿態。因此IMU在導航中有著很重要的應用價值。
想象一個笛卡爾坐標系,形如下圖所示,具有x軸、y軸和z軸,傳感器能夠測量各軸方向的線性運動,以及圍繞各軸的旋轉運動。這就是所有IMU的根本出發點,所有慣性導航系統都是據此而構建。

加速度計
加速度計測量加速度,利用的原理是a=F/M,測量物體的“慣性力”。加速度計在慣性參照系中用于測量系統的線加速度,但只能測量相對于系統運動方向的加速度(由于加速度計與系統固定并隨系統轉動,不知道自身的方向)。可以通過對加速度進行解算,求得角速度,但由于精度不高,不具有很好的使用價值。但是加速度計可以輔助陀螺儀進行角度解算。
陀螺儀
陀螺在慣性參照系中用于測量系統的角速率。通過以慣性參照系中系統初始方位作為初始條件,對角速率進行積分,就可以時刻得到系統的當前方向。我們現在智能手機上采用的陀螺儀是采用了MEMS微機電技術的MEMS陀螺儀,它需要參考其他傳感器的數據才能實現功能,但其體積小、功耗低、易于數字化和智能化,特別是成本低,非常適合手機、汽車牽引控制系統、醫療器材這些需要大規模生產的設備。
地磁場傳感器
磁力計/地磁場傳感器,它有個通俗的名字:電子羅盤。當加速度傳感器完全水平的時候,可以預料,重力傳感器無法分辨出在水平面旋轉的角度即繞Z軸的旋轉無法顯示出來,此時只有陀螺儀可以檢測。
陀螺儀雖然動態十分快速,但由于其工作原理是積分,所以在靜態會有累計誤差,表現為角度會一直增加或者一直減少。于是我們會需要一個在水平位置能確認朝向的傳感器,這就是如今IMU必備的第三個傳感器,地磁場傳感器,通過這3個傳感器的相互校正,我們終于在大的理論上可以得到比較準確的姿態參數了。
氣壓傳感器
氣壓傳感器用于檢測大氣壓強的儀器,實際應用當中氣壓傳感器可作高度計。在慣導系統中有時通過增加氣壓計增強Z軸動態與精度。
IMU的工作原理
IMU的原理和黑暗中走小碎步很相似。在黑暗中,由于自己對步長的估計和實際走的距離存在誤差,走的步數越來越多時,自己估計的位置與實際的位置相差會越來越遠。走第一步時,估計位置與實際位置還比較接近;但隨著步數增多,估計位置與實際位置的差別越來越大。根據此方法推廣到三維,就是慣性測量單元的原理。
學術上的表述是:以牛頓力學定律為基礎,通過測量載體在慣性參考系的加速度,將它對時間進行積分,且把它變換到導航坐標系中,就能夠得到在導航坐標系中的速度、偏航角和位置等信息。
因此,通俗來講,慣性測量裝置IMU屬于捷聯式慣導,該系統有三個加速度傳感器與三個角速度傳感器(陀螺)組成,加速度計用來感受相對于地垂線的加速度分量,速度傳感器用來感受角度信息。
值得注意的是,IMU提供的是一個相對的定位信息,它的作用是測量相對于起點物體所運動的路線,所以它并不能提供你所在的具體位置的信息,因此,它常常和GPS一起使用,當在某些GPS信號微弱的地方時,IMU就可以發揮它的作用,可以讓汽車繼續獲得絕對位置的信息,不至于“迷路”。
IMU的分類
目前來說,市面上存在的IMU以6軸與9軸為主。6軸IMU包含一個三軸加速度傳感器,一個三軸陀螺儀;9軸IMU則多了一個三軸的磁力計。另外,對于采用MEMS技術的IMU,一般還內置有溫度計進行實時的溫度校準。

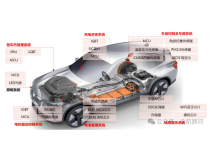
汽車中的IMU
IMU的應用
IMU大多用在需要進行運動控制的設備,如汽車和機器人上,也被用于需要用姿態進行精密位移推算的場合,如潛艇、飛機、導彈和航天器的慣性導航設備等。