談到自動駕駛的多傳感器融合,主要的還是攝像頭、毫米波雷達和激光雷達。關于這三種傳感器的大致特點和優缺點,行業里有很多討論,我們就不贅述了。
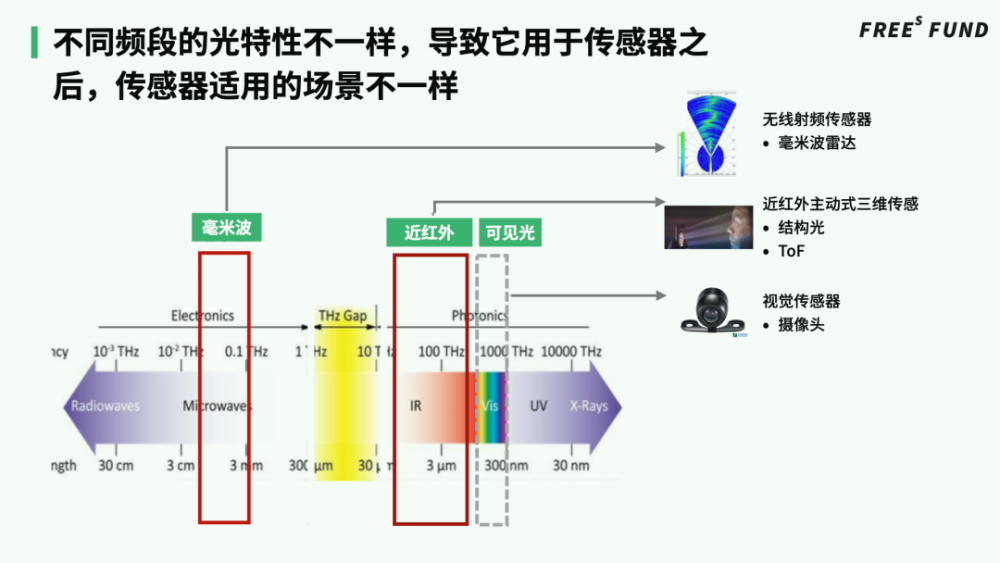
需要補充一點的是,從傳感的原理上,攝像頭和激光雷達本質上都是光學成像。攝像頭主要是可見光成像,可借助陽光、路燈、車燈等光源,更容易獲得比較高的平面分辨率;而激光雷達使用自己的專用光源,通常是不可見光的紅外激光光源,優勢在于獲得目標距離(深度)的信息;也因為激光雷達使用自帶的紅外激光光源,具有窄帶光譜的特性,天生比自然光成像具有更好的抗干擾性。
同時,因為自發光激光光源的相干性特點,可以采用光通訊行業長期積累的相干接收的技術成果,獲得更高的信噪比,在測距的同時獲得更多的測量數據,比如目標的運動速度,這也是行業里看好調頻連續波(FMCW) 技術的主要原因。
而毫米波雷達使用的是不同于光頻譜的無線電波,在雨、霧、霾等惡劣氣候下有非常明顯的優勢作用。但目前毫米波雷達在平面分辨率和距離分辨率上還不如攝像頭和激光雷達。毫米波雷達如果要提高以上兩個分辨率,需要使用更多的通道和天線單元,加大通訊帶寬,提高射頻頻段,這需要新的技術努力,并且在成本控制上也會有新的挑戰。在毫米波雷達領域,也不乏創新者,比如峰瑞資本投資的加特蘭微電子,主攻CMOS工藝毫米波雷達芯片開發與設計,在全球范圍內率先量產汽車級CMOS工藝77/79GHz毫米波雷達射頻前端芯片。
激光雷達是最晚進入汽車行業、同時也是討論熱度最高的傳感器。從全球領先的激光雷達公司Velodyne多線機械掃描雷達開始,眾多創業團隊嘗試了MEMs激光雷達、Flash(TOF)面陣成像、OPA相控陣激光掃描等多種技術方案。
努力的方向是兩個:一是降低成本,二是盡力減少機械運動部件,實現固態激光雷達,以滿足汽車惡劣的工作環境和超長的無故障工作時間要求。
3、激光雷達:ToF、OPA之爭
從技術維度看,Flash(TOF)面陣成像和OPA相控陣技術方案無疑是更接近理想固態構架的方案,因為它們都是基于半導體芯片技術。
而MEMS技術(Micro-Electro-Mechanical System,也叫做微電子機械系統、微系統、微機械等)雖然也使用半導體工藝和技術,但由于在芯片內部使用了微電機構建的振鏡作為激光束控制方向的部件,本質上還是包含一個機械運動部件,同時想在微小尺寸的振鏡上實現線性很好的掃描線控制和大的掃描角度也面臨許多技術挑戰。
Flash(快閃)激光雷達技術是最接近攝像頭技術的方案,可以利用攝像頭行業很多成熟的技術和工藝成果。但是,由于Flash激光雷達使用面陣的光源,由于人眼安全標準等現實限制,Flash 激光雷達更適用近距離、中距離的應用場景。蘋果在2020年推出的iPad Pro上使用了激光雷達,在掃描方式上,蘋果選擇的是Flash方案。激光雷達利用直接飛行時間 (dToF),測量室內或室外環境中從最遠五米處反射回來的光。單光子dToF技術是未來實現激光雷達(LiDAR)小型化、低成本、可量產的一項關鍵技術。
峰瑞資本投資的南京芯視界微電子,正是以光電轉換器件設計和單光子檢測成像技術為核心,提供單光子dToF三維圖像傳感芯片、大數據中心超高速光電互聯芯片及系統解決方案的公司。
OPA激光雷達是被行業最寄予厚望的技術方向。它的原理是,通過控制納米天線陣列中每個天線的發射信號相位,使得不同天線單元的信號互相干涉,從而控制輸出的激光束的方向。它是原理上最接近射頻頻段相控陣雷達的技術,如果能夠實現芯片化,將是目前能看到的最理想的純固態激光雷達技術路線。
除了純固態的優點,由于OPA激光雷達是由電信號完全控制激光掃描方向,能夠動態地調節掃描角度范圍,對目標區域,進行全局掃描或者某一區域的局部精細化掃描,一個激光雷達就可能覆蓋近距離、中距離、遠距離的目標、距離探測,如果和FMCW技術相結合,還可以直接提供目標的運動速度。
換句話說,OPA激光雷達沒有采用任何機械運動部件,卻實現了類似人眼視覺的機動性、靈活性。