力矩傳感器是一種能感知力、力矩并轉換成可用輸出信號的傳感器,包括本體單元和應變/形變檢測系統兩部分。其核心原理基于霍克定律,當有力作用于傳感器本體單元上并引起本體單元的應變或形變時,檢測系統可感知本體的應變或形變,通過電路將其轉化為相應電壓,通過測量電壓值來表征力的大小,并轉換成輸出信號,實現力的測量。
按照測量原理,力矩傳感器可以分為光電式、應變式、電容式、壓電式等多種類型。其中應變式力矩傳感器是當前技術最為成熟、應用最廣泛的類型,具有結構簡單、制作容易、價格低廉等優點。
而按照測量維度,力矩傳感器可以分為一至六維力矩傳感器,其中一維、三維和六維力矩傳感器最常見,六維力矩傳感器精度最高,其內部算法會解耦各方向力和力矩間的干擾,使對力的測量更為精準。而一維與三維力矩傳感器在多方向、不同距離情況下所測數據失真。
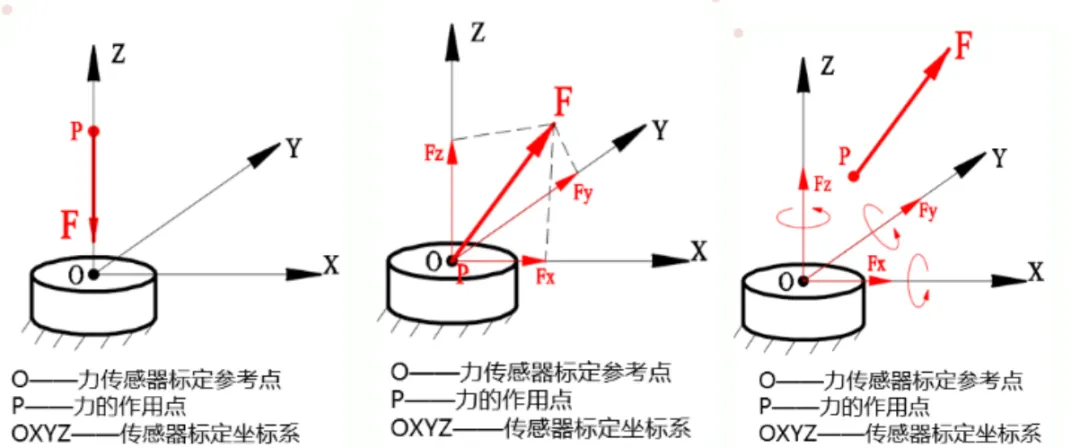
圖5:一維、三維、六維力矩傳感器(從左至右)作用示意圖
在機器人領域,力矩傳感器可用于實時測量機器人關節所受到的外部力和內部受力情況,以及末端執行器與外界環境交互的受力情況,一般安裝在機器人腳掌與踝關節之間和機械手與腕關節之間,以提供更加全面的力覺感知。
根據高工機器人數據,2022 年中國力傳感器市場依然以外資品牌為主導,國產份額低于 30%,國內廠商主要有宇立儀器、坤維科技(國內兩大龍頭)、柯力傳感、東華測試等,國外主要有 ADI、ST 以及 TDK 等。
3.2
視覺傳感器
視覺傳感器主要分為2D和3D兩種,其中2D通過相機拍攝平面照片再通過圖像分析或對比識別對象。而3D主要通過3D攝像頭采集視野空間內每個點位的三維坐標信息,再利用算法復原獲得三維立體成像。

圖6:2D(左)和3D(右)視覺傳感器原理
由于在面對復雜的物件辨識和尺寸量度任務,以及人機互動所需要的復雜互動時,2D視覺在精度和距離測量上存在技術局限,因此市場對3D視覺的需求與日俱增。根據成像原理的不同,3D視覺感知技術可分為光學和非光學兩大類,主要包括飛行時間(ToF)法、結構光法、激光掃描法、莫爾條紋法、激光散斑法、干涉測量法、照相測量法、激光跟蹤法、基于運動的形狀獲取、基于陰影的形狀獲取等多種技術。在人形機器人應用領域,3D視覺傳感器可以幫助機器人高效完成人臉識別、距離感知、避障、導航等功能,使其更加智能化。現階段,在人形機器人運用最廣泛的依舊是光學方法。
根據華經產業研究院數據,目前視覺傳感器全球競爭格局仍以外資為主,2021年基恩士為行業龍頭,全球市占率超50%,其次為康耐視。國內視覺傳感器市場較為分散,奧普特相對領先。
3.3
觸覺傳感器
機器人觸覺與視覺一樣,基本上是模擬人的感覺。利用觸覺可進一步感知物體的形狀、軟硬等物理性質,從而實現抓取等動作。一般把檢測感知與外部直接接觸而產生的接觸覺和壓力等信息的傳感器稱為機器人觸覺傳感器,通過將信號從其他物理波形轉換成電流或電壓波形,然后通過數字電路對波形進行處理,并以電磁波的形式傳輸,再由另一個傳感器接收和轉換成需要的信號形式來工作。觸覺傳感器主要分為柔性和剛性(MEMS為主),但柔性傳感器是人形機器人行業的主流研究和投入方向,根據原理不同可分為電容、電感、壓阻等5種,目前壓阻式相對主流。電子皮膚(E-skin)是柔性傳感器的重要應用,被視為未來技術發展方向,在人形機器人觸覺方案中得到較多關注。

圖7:觸覺傳感器結構
柔性觸覺傳感器目前處于發展早期,以海外企業為主,國內布局相對領先的主要為漢威科技子公司能斯達(目前已有一條年產1000 萬支柔性傳感器的超凈印刷線和組裝線)、奧迪威及帕西尼。根據海外市場研究公司QY Research數據,按照銷售金額計,2022年全球前五大廠商(Novasentis、Tekscan, Inc.、Japan Display Inc.、Baumer Group、Fraba Group)占有大約 57.1%的市場份額。