




視覺:機器人視覺的要點在于移動場景、精細描繪和高集成度。機器人自主導航與汽車自動駕駛技術系出同源,其中機器人視覺受限于內部空間,需具有更高集成度。機器人自主導航與汽車自動駕駛共同的三大關鍵技術為環境感知、規劃決策與執行控制,自動駕駛和機器人主要通過傳感器來獲取周圍環境信息。
常用的視覺和環境感知傳感器為攝像頭、雷達(毫米波、激光、超聲波等)、紅外傳感器、GPS、IMU等。

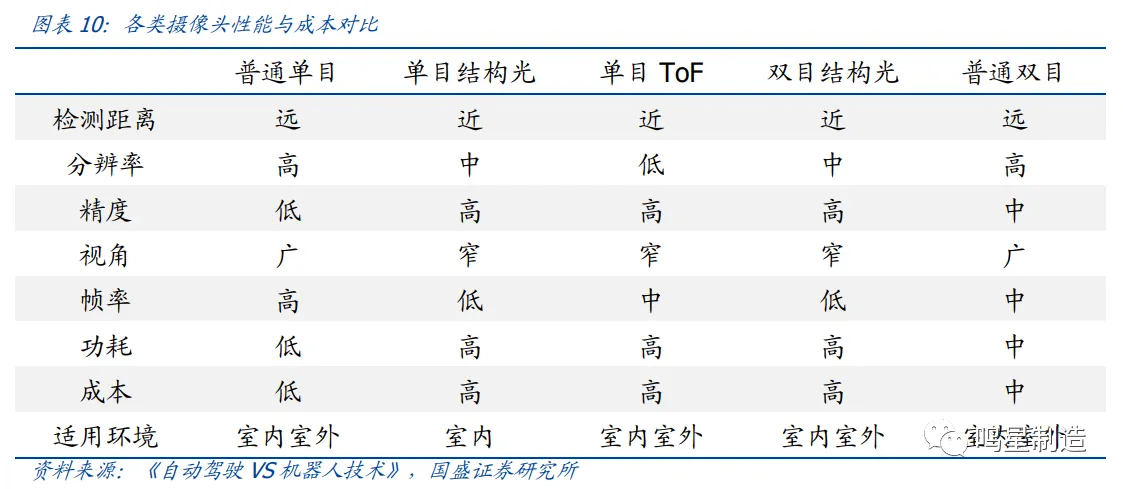
攝像頭:機器人的眼睛,包括普通單目攝像頭與深度攝像頭。
1)普通單目攝像頭:通過圖像匹配進行目標識別,再通過目標在圖像中的大小去估算目標距離,缺陷在于對距離的識別依賴于圖像識別的準確度;
2)單目結構光深度攝像頭:由一個RGB攝像頭、結構光投射器(紅外)和結構光深度感應器(CMOS)組成,通過投影一個預先設計好的圖案作為參考圖像(編碼光源),將結構光投射至物體表面,再通過深度感應器接收該物體表面反射的結構光圖案,由于接收圖案會因物體的立體形狀而發生變形,因此可以通過該圖案在攝像機上的位置和形變程度來計算物體表面的空間信息;
3)雙目深度攝像頭:雙目攝像頭的原理與人眼相似,通過對圖像視差進行計算,直接對前方景物進行距離測量;
4)ToF深度攝像頭:即飛行時間攝像頭,由光源、光學部件、傳感器、控制電路以及處理電路等幾部單元組成,通過給目標連續發送光脈沖,利用傳感器接收從物體返回的光,通過探測光脈沖的飛行(往返)時間來得到目標物體的距離。
激光雷達:激光器發射出脈沖激光打到物體引起散射,一部分光波會反射到激光雷達的接收器上,根據激光測距原理可計算出距離信息。脈沖激光不斷地掃描目標物,就可以得到目標物上全部目標點的數據,用此數據進行成像處理后,即可得到精確的目標物體圖像。激光雷達分為單線和多線,常見的多線激光雷達有4線,8線,16線,32線和64線。其缺陷在于激光雷達易受大氣條件及工作環境煙塵等影響,難以實現全天候工作,且成本高昂。
毫米波雷達:毫米波是指波長在 1-10mm 之間的電磁波,換算成頻率后,毫米波的頻率位于30-300GHz 之間。與紅外、激光等光學導引頭相比,毫米波導引頭穿透霧、煙、灰塵的能力強,傳輸距離遠,具有全天候全天時的特點。同時,毫米波雷達性能穩定,不受目標物體形狀、顏色等干擾。其主要缺陷在于成本較高,價格僅次于激光雷達。
超聲波雷達:超聲波雷達是利用傳感器內的超聲波發生器產生 40KHz的超聲波,再由接收探頭接收經障礙物反射回來的超聲波,根據超聲波反射接收的時間差計算與障礙物之間的距離。超聲波雷達成本較低,探測距離近,精度高,且不受光線條件的影響,因此常用于泊車系統中。其缺陷在于檢測角度較小,一輛車可能需要在不同角度安裝多個超聲波雷達。
紅外傳感器:紅外傳感器的測距基本原理為發光管發出紅外光,光敏接收管接收前方物體反射光,據此判斷前方是否有障礙物。根據發射光的強弱可以判斷物體的距離,它的原理是接收管接收的光強隨反射物體的距離而變化,距離近則反射光強,距離遠則反射光弱。
馬斯克在股東日表示,特斯拉已經打通了FSD和機器人的底層模塊,實現了一定程度的算法復用。FSD算法利用傳感器數據進行環境感知,這些傳感器也可以幫助機器人感知周圍環境,識別物體、人和障礙物等。

力控:多維力矩/力傳感是目前最優解,電子皮膚或為觸覺終極方案。目前機器人力控方案大致有3類,分別為電流環力控、多維力矩/力傳感器力控、被動力控(彈性體),其中多維力矩/力傳感器力控是當前力控的最佳方案,其硬件包括關節部位的單軸力矩傳感器和機器人執行器末端的6軸力傳感器。























